Dynamic Environments
Predicting future states, actions and behavior of dynamic agents
Predicting future states, actions and behavior of dynamic agents
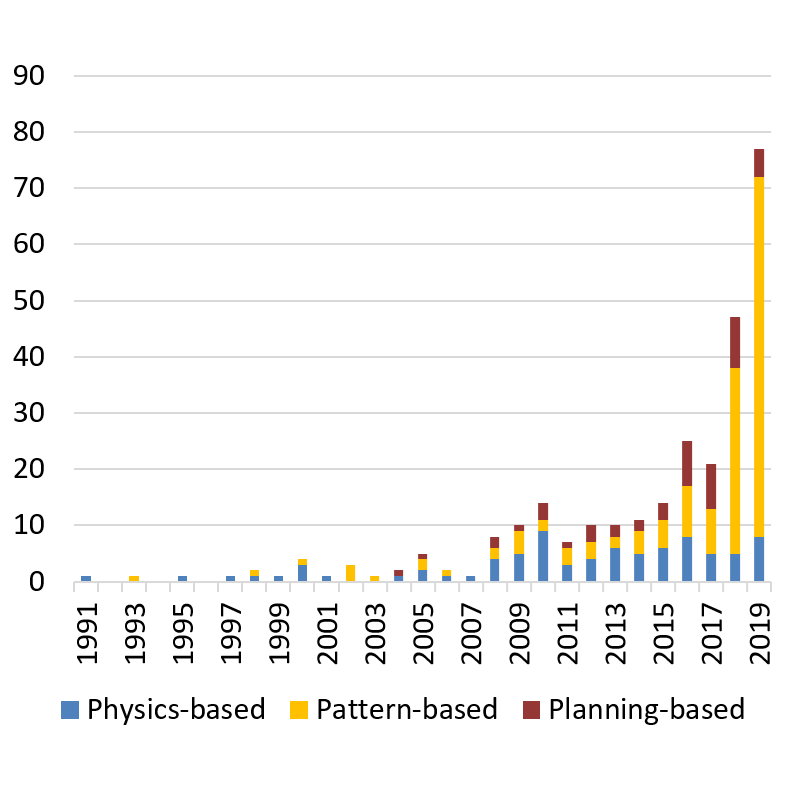
Researchers' interest to motion prediction has grown considerably in the recent years
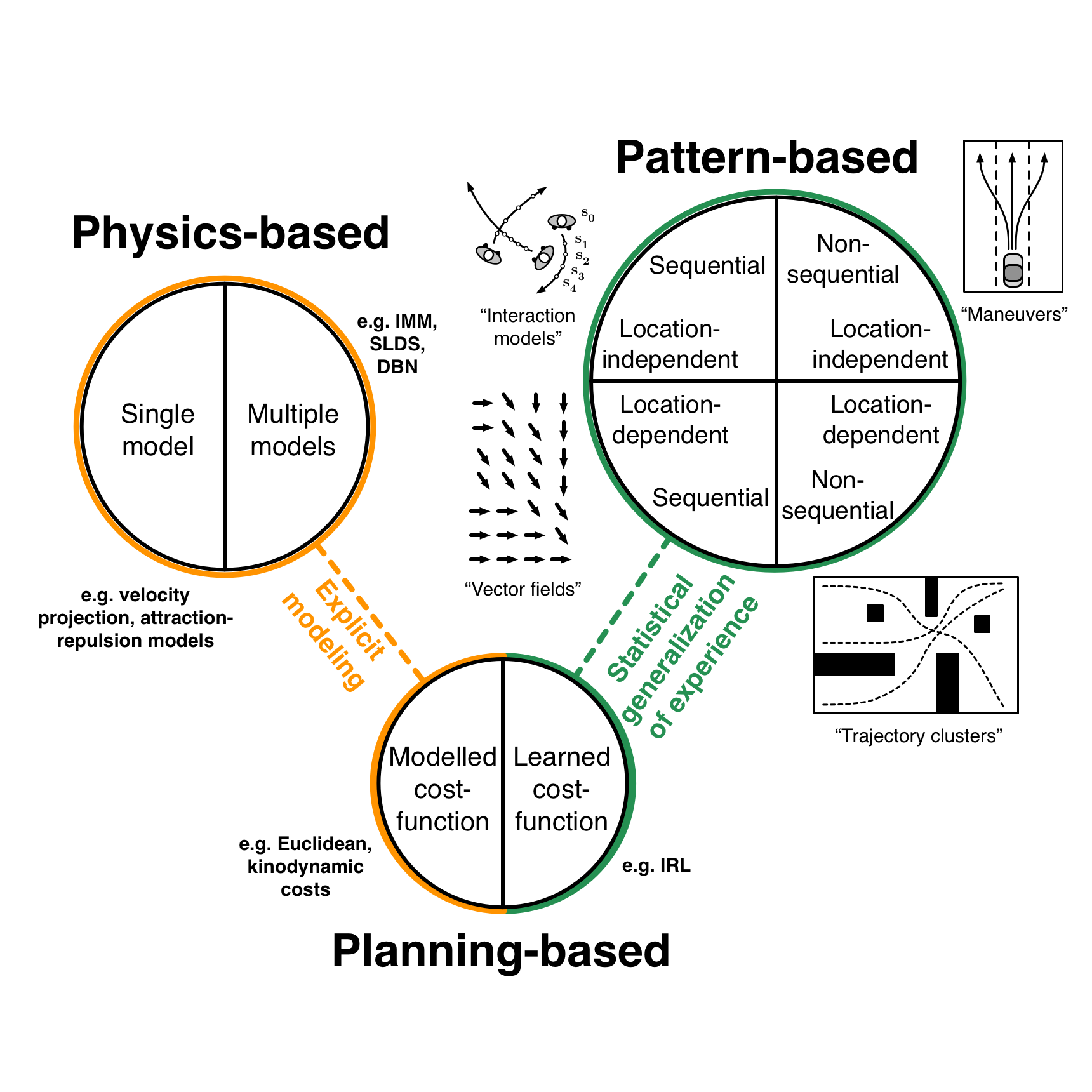
Human motion prediction encapsulates a wide variety of methods
Motion prediction is imperative for safety of automonous vehicles

Understanding and forecasting human activity is required for robot operation in shared spaces

Motion prediction is essential for close-proximity human-robot collaboration
Participation in this workshop is free of charge and no registration is required.
The main workshop track will be held in this Zoom room: https://epfl.zoom.us/j/95756947672. Additional rooms will be open during the poster session, see links on the Program page.
The workshop is featured in the ICRA 2020 Slack workspace. To connect, fill out this simple form, follow the link in the end, and then search for the #ws15 channel.
Our workshop is broadcast Live on IEEE.TV
Program of this half-day workshop includes 7 invited talks, a poster session and the trajectory prediction challenge. Details are available here.